
Você sabe como as casas são construídas? Geralmente é necessário que alguém, arquiteta(o) ou engenheira(o), crie um projeto para fazer um planejamento, certo? Mas já imaginou se os vários pedreiros fossem simplesmente colocando tijolos um do lado do outro, sem seguir planejamento algum? Será que poderia funcionar? Os cupins nos dizem que sim!

Um cupinzeiro é uma unidade composta, construída por centenas, ou até milhares de cupins. Os cupins trabalham em sintonia, sendo guiados todos apenas pelo que sentem de seu ambiente, através de seus sentidos químicos ou contato. Desta forma, os cupins constroem seus ninhos sem plantas nem arquitetos (ou seriam todos eles arquitetos??).
Há um tipo particular de área de pesquisa que estuda esse tipo de comportamento, que é chamada de “Sistema Complexos”. Os sistemas complexos ocorrem quando várias partes bem simples trabalham juntas, e o efeito final é algo muito mais elaborado, com propriedades e comportamentos complexos, que não podem ser explicados simplesmente pela soma das partes. Consegue imaginar algo assim além do cupinzeiro? A política e a sociedade podem ser considerada exemplos, uma vez que cada indivíduo, com seus próprios interesses particulares, geram comportamentos imprevisíveis (como uma revolução ou uma crise econômica!).

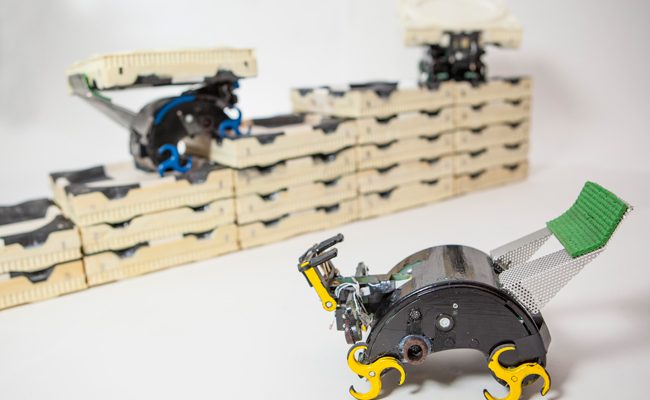
O cientista Justin Werfel e seus colaboradores refletiram se a forma de construção dos cupins poderia ser aplicada nas construções humanas, e criaram pequenos robôs construtores, simulando os pequenos cupins, e que, como eles, constroem usando apenas sua interação com o ambiente e outros indivíduos, sem um passo-a-passo que devem seguir. Ou seja, os robôs sabem como a construção deve ficar no final, mas a forma com que os blocos são colocados para fazê-la é decidida através das interações e posições dos robôs, que é única, e imprevisível.
Como é cada robô?
Os robôs podem apenas andar para frente e para trás, girar, pegar e colocar blocos, e subir um degrau da construção (mas eles podem criar escadas). Esses movimentos simples, como não permitir curvas, ajudam os robôs a não baterem e aumentam as chances do sistema dar certo. Eles são equipados com equipamentos que permitem que percebam apenas o que está nas suas redondezas, como outros robôs e blocos próximos.

Como eles “pensam”?
Os robôs recebem uma imagem da construção que devem fazer, e internamente transformam ela em uma representação da construção em blocos, a partir de onde decidem quais as “regras” do sistema de construção necessárias para que aquela construção da imagem seja feita.
Então, seguindo estas simples regras de movimento, todos os robôs daquele sistema começam a interagir uns com os outros e com o ambiente, e cada um leva um bloco e coloca em um lugar vago que cumpre os requisitos das suas regras de movimento.
Confira no vídeo a seguir como esses robôs interagem:
Por que copiar os cupins?
O conceito usado para definir o comportamento dos robôs é chamado de estigmergia, um termo a muito tempo usado pelos estudiosos de insetos. Ele foi inicialmente introduzido por Pierre-Paul Grassé, um estudioso de insetos sociais, para explicar como esses insetos se mexiam organizadamente sem nenhum tipo de comando central. A estigmergia foi utilizada para explicar vários outros comportamentos dos insetos sociais, incluindo a forma de construção dos cupins. Em suma, a estigmergia é uma forma de centromedicorelaxesalute.it auto-organização, e funciona como uma “inteligência de enxame”.
Essa inteligência dos enxames é então aproveitada por cientistas da computação que estudavam sistemas complexos, e diversos algoritmos de programação usam este princípio na inteligência artificial. Alguns exemplos, apenas para cupins (mas existem inúmeros para outros animais), incluem algoritmos baseados no comportamento desses insetos que otimizam sugestões de compras de mercadorias na internet ou para resolver de forma mais eficiente questões de roteamento de algumas redes wireless (mobile wireless ad-hoc networks).
Para quê fazer isso ao invés de construções normais?

Estes sistemas podem ser usados para construir onde humanos não conseguem chegar, ou onde seria muito perigoso, como lugares com grandes probabilidades de acidentes ou desastres de toda espécie.
Uma perspectiva interessante é construir coisas em lugares fora da Terra. Se porventura quisermos construir uma instalação em Marte, seria muito mais vantajoso usar robôs que podem se adaptar ao ambiente do que mandar humanos, ou até mesmo robôs com planos bem definidos, que podem falhar caso alguma eventualidade não planejada aconteça (o que poderia acontecer em Marte).
Essa tecnologia “cupinesca” também pode ser configurada para gerar construções que são ligeiramente diferentes, e que então permitiria construir complexos residenciais ou vilas, onde as casas não são iguais, mas ainda assim muito parecidas.
Biomimetismo: A natureza como professora
O sistema de robôs construtores de Werfel, que pode no futuro vir a mudar a forma como as construções são feitas, é uma forma de (bio)mimetizar, as habilidades dos insetos, ou seja, de copiar da natureza.
Diversos são os exemplos onde a observação da natureza levou ao desenvolvimento de novos pensamentos e novas tecnologias para os humanos (você sabia a ideia do velcro, de roupas, é um biomimetismo de carrapicho?!).
A verdade é que estudando a natureza, podemos aproveitar “invenções” que ela levou milhões de anos aprimorando. Assim, utilizamos essas invenções para resolver problemas humanos. O que mais poderemos aprender com ela?

REFERÊNCIAS
WERFEL, Justin; PETERSEN, Kirstin; NAGPAL, Radhika. Designing collective behavior in a termite-inspired robot construction team. Science, v. 343, n. 6172, p. 754-758, 2014.
R. Ali, S. Banerjee, N. I. Ghali and A. E. Hassanein, “Towards retail market recommendations using Termite Colony Optimization,” 2012 22nd International Conference on Computer Theory and Applications (ICCTA), Alexandria, 2012, pp. 128-131, doi: 10.1109/ICCTA.2012.6523558.
Martin R., Stephen W. (2006) Termite: A swarm intelligent routing algorithm for mobilewireless Ad-Hoc networks. In: Stigmergic Optimization. Studies in Computational Intelligence, vol 31. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-540-34690-6_7
Texto: Gustavo Pires Marques
Apresentação: Anna Beatriz dos Santos Bovo Nunes
[…] obra para o fechamento. Uma vez iniciada a tarefa, os operários entram em um processo chamado de estigmergia1, um mecanismo que coordena indiretamente as atividades de construção a partir da interação […]